System Neural Diversity: Measuring Behavioral Heterogeneity in Multi-Agent Learning
Abstract
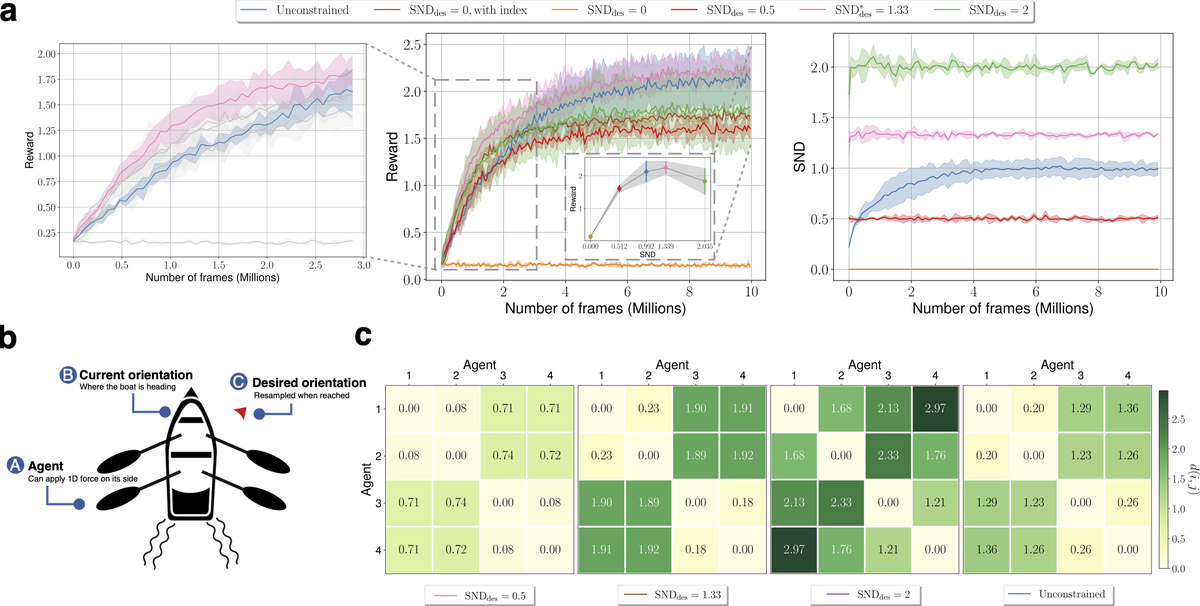
Evolutionary science provides evidence that diversity confers resilience in natural systems. Yet, traditional multi-agent reinforcement learning techniques commonly enforce homogeneity to increase training sample efficiency. When a system of learning agents is not constrained to homogeneous policies, individuals may develop diverse behaviors, resulting in emergent complementarity that benefits the system. Despite this, there is a surprising lack of tools that quantify behavioral diversity. Such techniques would pave the way towards understanding the impact of diversity in collective artificial intelligence and enabling its control. In this paper, we introduce System Neural Diversity (SND): a measure of behavioral heterogeneity in multi-agent systems. We discuss and prove its theoretical properties, and compare it with alternate, state-of-the-art behavioral diversity metrics used in the robotics domain. Through simulations of a variety of cooperative multi-robot tasks, we show how our metric constitutes an important tool that enables measurement and control of behavioral heterogeneity. In dynamic tasks, where the problem is affected by repeated disturbances during training, we show that SND allows us to measure latent resilience skills acquired by the agents, while other proxies, such as task performance (reward), fail to. Finally, we show how the metric can be employed to control diversity, allowing us to enforce a desired heterogeneity set-point or range. We demonstrate how this paradigm can be used to bootstrap the exploration phase, finding optimal policies faster, thus enabling novel and more efficient MARL paradigms.
Matteo Bettini
Researcher
Matteo’s research is focused on multi-agent reinforcement learning, with applications to robotics and LLM agents.
Ajay Shankar
Postdoctoral Researcher
Ajay’s research is that of a full-stack roboticist – with a focus on robust, optimal, and agile control + planning for various robots and robotic teams. Current focus is on scalable and learnt multi-robot coordination.
Amanda Prorok
Professor
Amanda’s research focuses on multi-agent and multi-robot systems. Our mission is to find new ways of coordinating artificially intelligent agents (e.g., robots, vehicles, machines) to achieve common goals in shared physical and virtual spaces.