Abstract
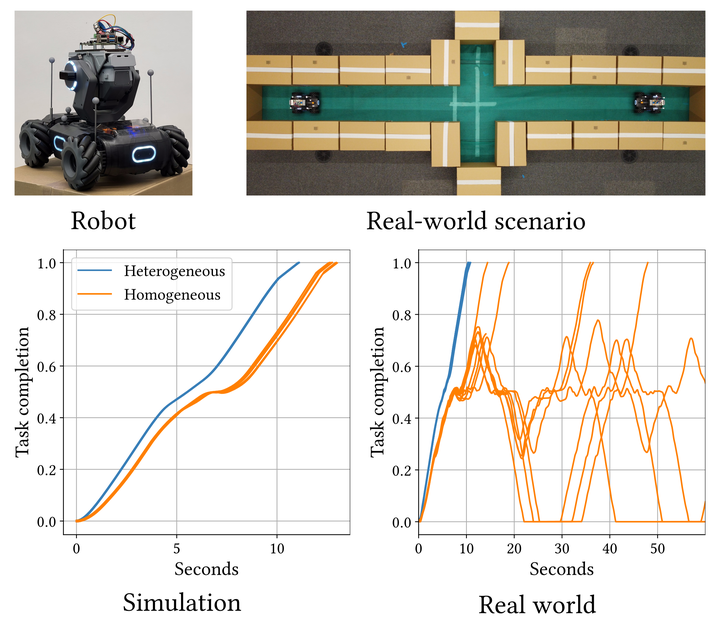
Cooperative multi-robot tasks can benefit from heterogeneity in the robots’ physical and behavioral traits. In spite of this, traditional Multi-Agent Reinforcement Learning (MARL) frameworks lack the ability to explicitly accommodate policy heterogeneity, and typically constrain agents to share neural network parameters. This enforced homogeneity limits application in cases where the tasks benefit from heterogeneous behaviors. In this paper, we crystallize the role of heterogeneity in MARL policies. Towards this end, we introduce Heterogeneous Graph Neural Network Proximal Policy Optimization (HetGPPO), a paradigm for training heterogeneous MARL policies that leverages a Graph Neural Network for differentiable inter-agent communication. HetGPPO allows communicating agents to learn heterogeneous behaviors while enabling fully decentralized training in partially observable environments. We complement this with a taxonomical overview that exposes more heterogeneity classes than previously identified. To motivate the need for our model, we present a characterization of techniques that homogeneous models can leverage to emulate heterogeneous behavior, and show how this “apparent heterogeneity” is brittle in real-world conditions. Through simulations and real-world experiments, we show that: (i) when homogeneous methods fail due to strong heterogeneous requirements, HetGPPO succeeds, and, (ii) when homogeneous methods are able to learn apparently heterogeneous behaviors, HetGPPO achieves higher resilience to both training and deployment noise.
Matteo Bettini
Researcher
Matteo’s research is focused on multi-agent reinforcement learning, with applications to robotics and LLM agents.
Ajay Shankar
Postdoctoral Researcher
Ajay’s research is that of a full-stack roboticist – with a focus on robust, optimal, and agile control + planning for various robots and robotic teams. Current focus is on scalable and learnt multi-robot coordination.
Amanda Prorok
Professor
Amanda’s research focuses on multi-agent and multi-robot systems. Our mission is to find new ways of coordinating artificially intelligent agents (e.g., robots, vehicles, machines) to achieve common goals in shared physical and virtual spaces.