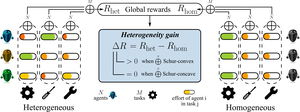
Focusing on multi-agent task allocation problems, our goal is to study the question: What kinds of objectives are best suited for heterogeneous teams? We first consider an instantaneous, non-spatial setting where the global reward is built by two generalized aggregation operators: an inner operator that maps the N agents’ effort allocations on individual tasks to a task score, and an outer operator that merges the M task scores into the global team reward. We prove that the curvature of these operators determines whether heterogeneity can increase reward, and that for broad reward families this collapses to a simple convexity test. Next, we study heterogeneity in multi-agent reinforcement learning (MARL) and introduce Heterogeneous Environment Design (HED), a gradient-based algorithm that optimizes the parameter space of underspecified MARL environments to find scenarios where heterogeneity is advantageous.