Hello! 👋
I am Matteo, a researcher in machine learning.
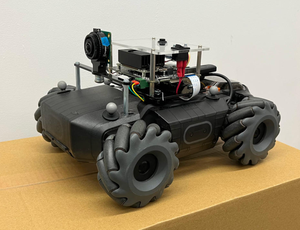
My research focuses on reinforcement learning applied to multi-agent and multi-robot systems.
I am currently working on training LLM agents for long-horizon tasks using reinforcement learning at Meta.
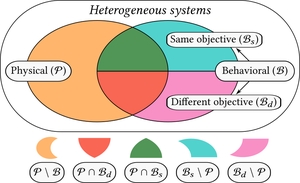
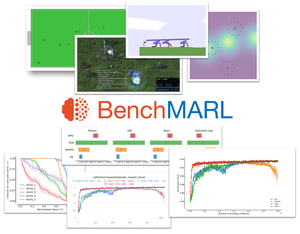
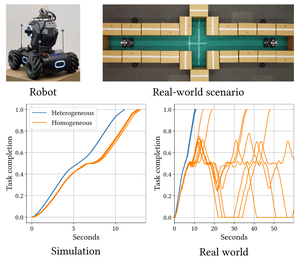
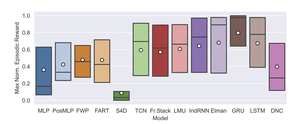
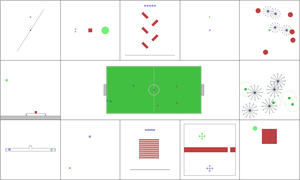
I obtained my PhD from the Prorok Lab at the University of Cambridge, were I studied heterogeneity in multi-agent and multi-robot systems and developed the VMAS simulator. For this research, I employed techniques from the fields of Multi-Agent Reinforcement Learning and Graph Neural Networks. During my PhD, I joined PyTorch at Meta, where I created BenchMARL and helped develop TorchRL.
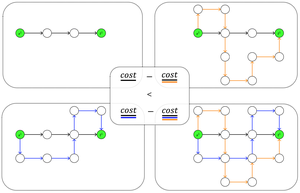
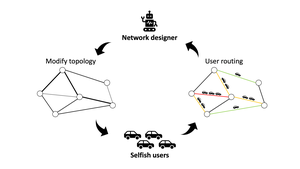
For my master, I investigated the problem of transport network design for multi-agent routing.
See my CV and the (more verbose) academic CV.
- Reinforcement Learning
- Multi-Robot Systems
- LLM Agents
- Heterogeneous Multi-Agent Learning and Coordination
- Graph Neural Networks
PhD in Computer Science, 2025
University of Cambridge
MPhil in Advanced Computer Science, 2021
University of Cambridge
BEng in Computer Engineering, 2020
Politecnico di Milano
Featured Publications
Publications
To find relevant content, try searching publications or filtering using the buttons below.
*



{kind=link}